
208: What If You Had a Machine Do It
Elecia gave a talk about machine learning and robotics at the Hackaday July Meetup at SupplyFrame DesignLab (video!) and LA CrashSpace. She gives it again in the podcast while Chris narrates the demos.
Embedded show #187: Self Driving Arm is the interview with Professor Patrick Pilarski about machine learning and robotics applied to prosthetic limbs.
I have also written more about my machine learning + robot arm on this blog. My code is in github (TyPEpyt).
My machine learning board is Nvidia’s Jetson TX2. The Two Days to a Demo is a good starting point. However, if you are new to machine learning, a better and more thorough introduction is the Andrew Ng’s Machine Learning course on Coursera. To try out machine learning, look at Weka Data Mining Software in Java for getting to know your data and OpenIA Gym for understanding reinforcement learning algorithms
I use the MeArm for my robot arm. For July 2017, the MeArm kit is on sale at the Hackaday store with the 30% off coupon given at the meetup (or in Embedded #207).
Inverse kinematics is a common robotics problem, it took both Wiki and this blog post to give me some understanding.
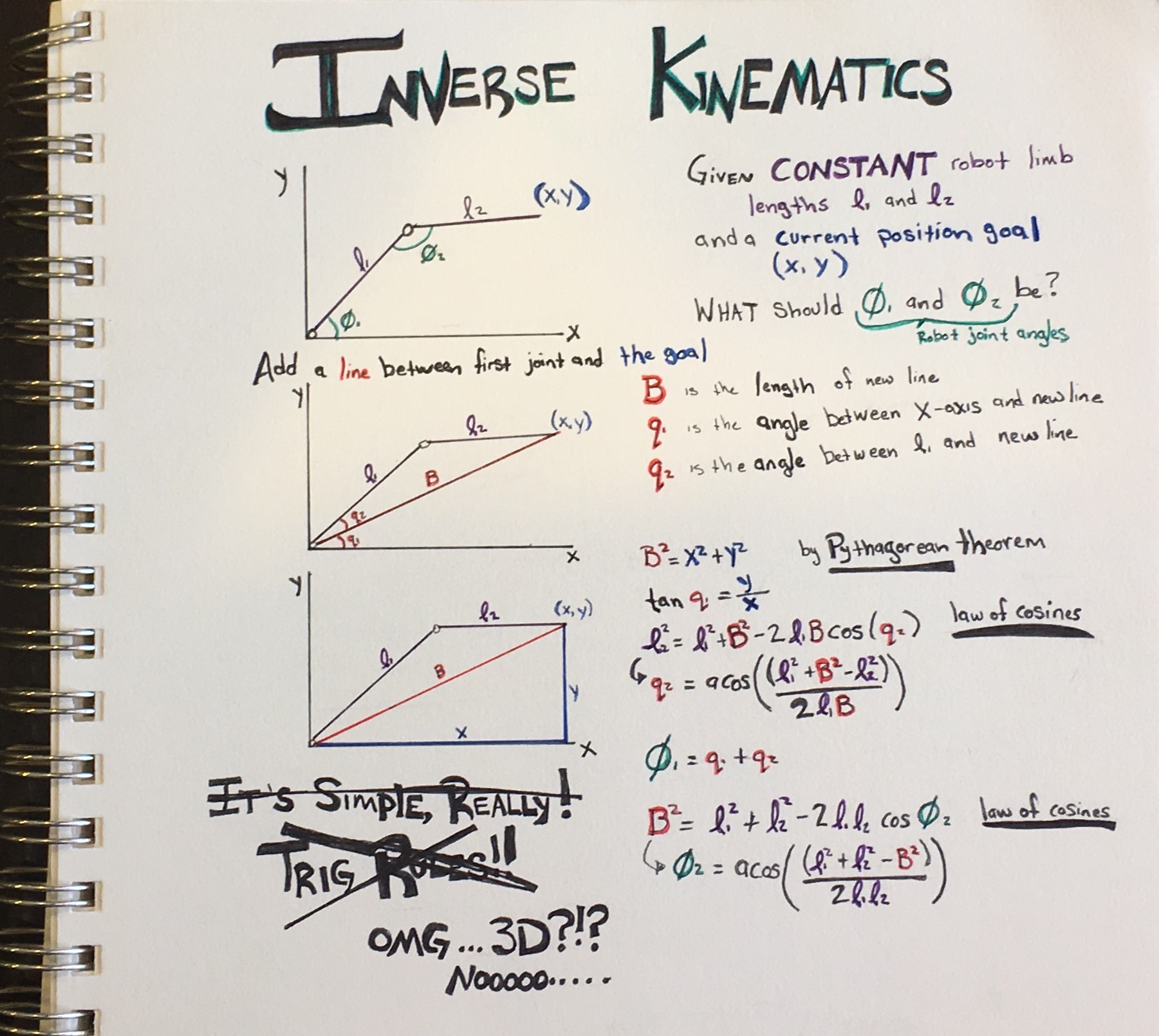
I wasn't sure about the Law of Cosines before starting to play with this so I made a drawing to imprint it into my brain.

Robot Operating System (ROS) is the publisher-subscriber architecture and simulation system. (I wrote about ROS on this blog.) To learn about ROS, I read O’Reilly’s Programming Robots with ROS and spent a fair about of time looking at the robots on the ROS wiki page.

I am using OpenCV in Python to track the laser. Their official tutorials are an excellent starting point. I recommend Adafruit’s PCA9685 I2C PWM/Servo controller for interfacing the Jetson (or RPi) to the MeArm.
Finally, my talk notes and the Hackaday Poster!

